Recuperatorio del Primer Parcial SC2 2025
RECUPERATORIO DEL PRIMER PARCIAL
A continuación, se presenta el modelo matemático del filtro LC de salida de un convertidor Buck con carga resistiva ensayado en el laboratorio.

Las impedancias Z1(s) = rL + sL y Z2(s) = rC + 1/(sC).
El circuito empleado es el siguiente:
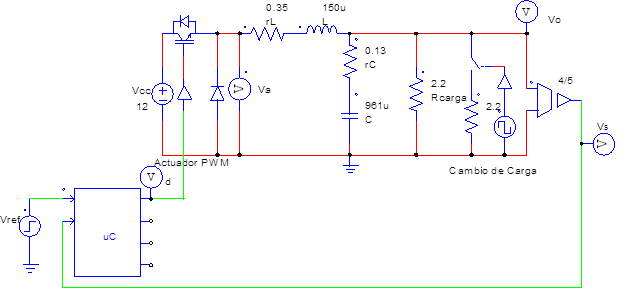
Fig. 1: Esquema del convertidor Buck para control de tensión de salida.
Los valores medidos de los componentes son:

La ganancia del actuador vincula el ciclo de trabajo del PWM d(t)
con la tensión Va(t) aplicada sobre el filtro LC, ósea
Va(s)/d(s) = Ka. Luego
la normalización para la implementación digital en un microcontrolador es Kn
= 1/4.
La tensión de salida debe mantenerse en VOref =
5 V. Con este valor se puede obtener el valor de voltaje de referencia (Vref)
a utilizar dentro del procesador digital.
a) Calcular el valor del ciclo útil (d) a aplicar al modulador PWM para obtener la tensión de referencia a lazo abierto. Trazar la respuesta al escalón para este ciclo útil mostrando la salida en Volts. (0,5 puntos)
Con el objetivo de que para un escalón de Vref, la respuesta en lazo cerrado presente un sobrepaso igual o menor al 2% y un tiempo de asentamiento de 3 ms ±10%, se diseña en el dominio del tiempo continuo, un controlador Proporcional Integral (PI), cuya función de transferencia resulta:

Primera parte: Rediseño Digital
b) Seleccionar el periodo de muestreo T a partir del tiempo de subida del sistema en lazo cerrado compensado con el controlador indicado en (1), utilizando un número de muestras Nr =10. Seleccionar una frecuencia de muestreo fm en cifras enteras del orden de los 10000 y con redondeo ascendente (por ejemplo, si fm calculado es de 4538 Hz, seleccionar 10000 Hz). (0,5 puntos)
c) A partir del método de rediseño digital y con el periodo de muestreo obtenido en el punto anterior, obtener las funciones de transferencia muestreadas del controlador en (1) utilizando las siguientes aproximaciones: 1) Backward; 2) Forward y 3) Tustin. Presentar sus expresiones en la forma ‘zpk’. (1 punto)
d) Para el compensador del tipo Tustin, agregue la compensación del ZOH y seleccione un valor del escalar e para mantener la estabilidad del sistema en LC. (0,5 puntos)
e) Con el
periodo de muestreo T, obtener la función de transferencia muestreada
de la planta utilizando un ZOH e incluir el atraso de implementación digital,
y, teniendo en cuenta la ganancia del actuador, del sensor y de normalización, obtener
con cada uno de los controladores aproximados, lo siguiente, en un mismo
gráfico: (2 puntos)
e.1) las respuestas al escalón de
entrada del sistema en LC para el valor de Vref junto con la
respuesta en tiempo continuo utilizando el compensador (1).
e.2) las respuestas al escalón de
la acción de control en LC para el valor de Vref junto con la
respuesta de acción de control en tiempo continuo utilizando el compensador
(1).
OBSERVACIONES: En cada figura tienen que aparecer 5
curvas; 1 del sistema en tiempo continuo y 4 del sistema en tiempo discreto.
f) Indicar en el texto (no en las figuras), los valores de sobrepaso y de tiempo de asentamiento de las respuestas de tensión, y el pico máximo y el valor de régimen permanente para las respuestas de las acciones de control, para cada caso. (0,5 puntos)
g) Obtener la ecuación recursiva a diferencias finitas del compensador final (Tustin con el compensador del ZOH) y describa ¿Qué formato de punto fijo utilizaría si tiene que implementar el control en un microcontrolador con tamaño de palabra de 16 bits y aritmética de punto fijo? (1 punto)
h) A partir de la información suministrada en el punto ‘f’ y observando las gráficas proponga las soluciones que considere adecuadas para mejorar el régimen transitorio, y elija la aproximación que utilizaría justificando su respuesta. Por otro lado, razonar ¿porque se agrega un atraso en las respuestas obtenidas? (0,5 puntos)
Segunda parte: Diseño en el tiempo discreto
i) Diseñar un controlador adecuado en tiempo discreto mediante el método del LGR en el plano z, para las mismas especificaciones de desempeño iniciales (), pero en este caso, incluir el atraso de un periodo de muestreo por la implementación digital. (1,5 puntos)
j) Trazar la respuesta al escalón de Vref de la tensión de salida y de la acción de control. Si es necesario, realizar un ajuste para que la acción de control no supere la unidad y el sistema cumpla con las especificaciones. (0,5 puntos)
k) Trazar el diagrama de Bode para verificar los márgenes de estabilidad y compararlo con el Bode del sistema compensado en tiempo continuo. Analice ambos casos, y, en base a las diferencias que observe, obtenga las conclusiones correspondientes. (0,5 puntos)
l) Junto al examen se acompaña un modelo hecho en PSIM (con un bloque de ganancia representando al actuador), en el cual debe implementar el controlador calculado en esta última etapa. Mostrar la ecuación recursiva empleada y las respuestas temporales en p.u. de la referencia, la salida y la acción de control. Comentar los resultados obtenidos. (1 punto)
- 14 de octubre de 2025, 19:49