Ejercicio Integrador 2024 - Control de Robot Diferencial
Ejercicio de integración de conceptos de la asignatura Computación.
2. Introducción
2.7. Conexiones de motores
Para la conexión de los motores, debe utilizarse los conectores M0 y M1,
los cuales poseen una etapa adicional entre entre el Arduino y estos
puntos de conexión. La función de esta etapa es manejar la corriente necesaria para el funcionamiento de los motores.
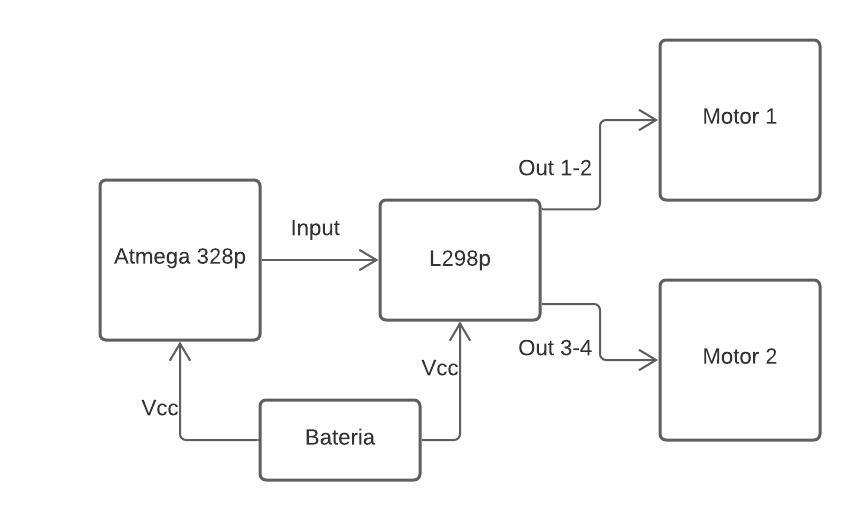
La figura muestra un diagrama de bloques que simboliza el funcionamiento. Se observa que este bloque esta formado por el circuito integrado L298p que es un Doble Puente H. Que es capaz de manejar los dos motores de manera independiente. Permitiendo seleccionar el sentido de giro y habilitar las salidas de manera independiente.
Para ello se utilizan las siguientes conexiones:
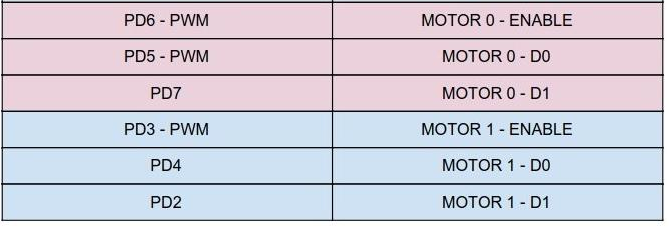
Donde se muestran las señales que deben tenerse en cuenta para conseguir que ambos motores en ambos sentidos, alternando los estos altos y bajos D0 y D1 y con una señal analógica sobre ENABLE que permite modular la velocidad de cada motor respectivamente.
Por ejemplo, con la combinación
MotorX_D0 = Alto
MotorX_D1 = Bajo
MotorX_Enable= [ 0:255]
el motor gira en un Sentido
MotorX_D0 = Bajo
MotorX_D1 = Alto
MotorX_Enable= [ 0:255]
El motor gira en sentido opuesto