Ejercicio Integrador 2024 - Control de Robot Diferencial
Ejercicio de integración de conceptos de la asignatura Computación.
2. Introducción
2.2. Conexiones generales.
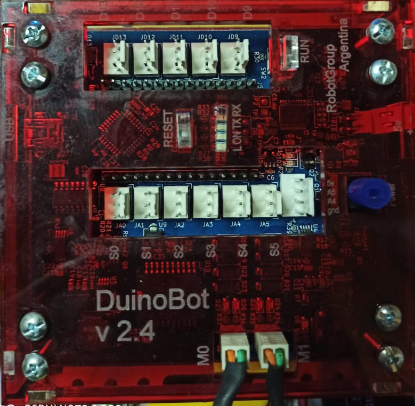
El robór cuenta con una placa de control. A la cual se conecta todos los elementos, como motores, sensores y otros.
En la siguiente imagen se pueden identificar los conectores.
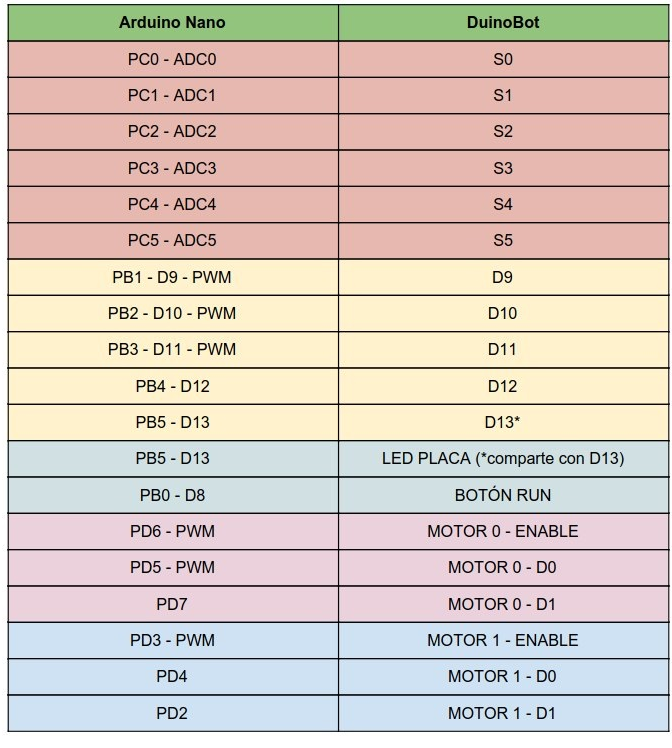
Los conectores S0 a S5 están previstos para se usados como "entradas analógicas", es decir entradas de las que pueden obtenerse valores entre 0 255 o 0 y 1024, que guardan alguna proporcionalidad, en el mejor de los casos, o al menos correlacionados de alguna manera con una magnitud física que pueda medir un sensor. Sin embargo pueden configurarse como entradas o salidas digitales.
Por otra parte se encuentran las conexiones D9 a D13 los cuales pueden ser utilizados como entrada o salida de propósito general.
DEBE TENERSE EN CUENTA QUE LA CORRIENTE (CARGA) QUE PUEDEN SOPORTAR ESTAS ENTRADAS O SALIDAS ES MUY LIMITADA.
Cada una de estas entradas y/o salidas de la placa, así como algunos componentes internos, están conectadas al Arduino siguiendo la siguiente conexión lógica: