Segundo Parcial SC2 2023
Completion requirements
Opened: Wednesday, 8 November 2023, 8:00 AM
Due: Wednesday, 8 November 2023, 1:00 PM
SEGUNDO EXAMEN PARCIAL
Ejercicio Nº1:
Un motor de corriente continua posee la siguiente FT.
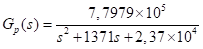
Donde la ganancia del actuador es 12V/V y la ganancia del sensor es tal que para la velocidad nominal de 3750RPM (ojo) se obtiene 3V. Igualmente dentro del DSP se normaliza esta variable.
- Con el tiempo de asentamiento medido en la banda de error del 5% de la respuesta a lazo cerrado calcular el periodo de muestreo. Con el mismo obtener la función de transferencia muestreada del proceso y la función de transferencia a lazo cerrado sin compensar. (1 punto)
- Diseñar un controlador con respuesta de tiempo mínimo o deadbeat para una entrada en escalón unitario (p.u.) equivalente a la velocidad nominal. (1 punto)
- Trazar la repuesta de la señal de salida compensada y compararla con la respuesta a lazo cerrado sin compensar de la FT obtenida en el punto a. Trazar, además, las señales del error y de la acción de control del proceso en lazo cerrado. Comentar los polinomios que permiten obtener la salida respecto a la referencia y la acción de control respecto a la referencia. Comentar las mejoras obtenidas con este controlador y justificarlas. (1 punto)
- Obtener la ecuación recursiva del controlador calculado para poder ser empleado en un DSP de 16 bits de punto fijo. Seleccionar un formato Qx adecuado. (1 punto)
- ¿La acción de control obtenida es elevada? ¿Qué opciones propone para reducir dicha acción de control? Proponer un periodo de muestreo tal que el controlador tenga una acción máxima dentro de la unidad para una referencia de 0,5p.u. (1 punto)
Ejercicio Nº2:
La función de transferencia de un convertidor CC-CA, está dada por la siguiente expresión
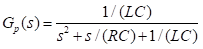
Donde L = 1mH, C = 60µH, R = 2Ω
- Diseñar un controlador digital PD predictivo mediante el LGR para que, ante una entrada en escalón unitario, la salida del sistema presente en lazo cerrado, un sobrepaso Mp ≤ 2% y un tiempo de asentamiento ts ≤ 2ms. La frecuencia de muestreo es de 10kHz. (1 punto)
- Trazar las repuestas de
salida y acción de control del sistema en LC ante un escalón unitario para:
(2 puntos)
1. El sistema compensado con el PDp y
2. El sistema compensado con el PDp + una acción feedforward (FF).
Indicando los tiempos de asentamiento, errores de régimen estacionario, y porcentajes de sobrepaso para la señal de salida.
- Graficar la respuesta del sistema compensado con el PDp + FF ante una entrada del tipo sinusoidal con frecuencia de 50Hz y amplitud unitaria. Obtener el error y la acción de control. (1 punto)
- Obtener la ecuación a diferencias recursiva completa del controlador y analice el formato Qx necesario para su implementación en un microprocesador con aritmética de punto flotante y registros de ancho de palabra de 32 bits. (1 punto)