Buses de Campo
| Site: | Facultad de Ingeniería U.Na.M. |
| Curso: | Programación Avanzada [IM401] |
| Livro: | Buses de Campo |
| Impresso por: | Usuário visitante |
| Data: | sábado, 5 jul. 2025, 16:11 |
Descrição
Un bus de campo es un sistema de comunicación digital utilizado en automatización industrial para interconectar sensores, actuadores y dispositivos de control dentro de una red. Permite la transmisión de datos en tiempo real entre los dispositivos de campo y los sistemas de supervisión (PLRs, PLCs, SCADA, DCS).
Características Principales:
- Comunicación digital: Reemplaza señales analógicas con transmisión de datos en serie.
- Topología flexible: Puede adoptar configuraciones en línea, anillo, estrella o árbol, dependiendo del protocolo.
- Reducción de cableado: Un solo cable puede transportar datos y, en algunos casos, alimentación eléctrica.
- Determinismo y tiempo real: Algunos buses permiten una comunicación predecible con tiempos de respuesta definidos.
- Interoperabilidad: Dependiendo del estándar, pueden coexistir dispositivos de diferentes fabricantes.
Aplicaciones:
- Automatización de fábricas (control de motores, sensores, actuadores).
- Monitoreo de procesos industriales.
- Control en sistemas de transporte, energía y manufactura.
1. Listado de los principales buses de campo utilizados en la industria
1. IO-Link
Tipo: Comunicación punto a punto.
Características: Protocolo estandarizado (IEC 61131-9) para la comunicación digital con sensores y actuadores. No es un bus de campo en sí, sino una extensión de E/S convencionales.
Aplicaciones: Automatización industrial, integración con buses de campo como Profibus o Profinet, diagnóstico avanzado y mantenimiento predictivo.
2. AS-Interface (AS-i)
Tipo: Bus de campo sencillo y económico.
Características: Utiliza un cable de dos hilos para comunicación y alimentación de sensores/actuadores. Admite hasta 62 dispositivos por red.
Aplicaciones: Integración con PLCs en automatización industrial, líneas de ensamblaje, transporte de materiales y sistemas de seguridad.
3. Modbus (RTU, ASCII, TCP)
Tipo: Protocolo maestro-esclavo.
Características: Disponible en versiones serie (RS-232/RS-485) y Ethernet (TCP/IP). Fácil de implementar y compatible con múltiples fabricantes.
Aplicaciones: Control de procesos, monitoreo de sensores de temperatura, presión, nivel y variadores de velocidad.
4. Profibus (DP, PA)
Tipo: Bus de campo de alto rendimiento.
Características: Profibus DP (alta velocidad para automatización discreta), Profibus PA (para entornos peligrosos en automatización de procesos).
Aplicaciones: Control de maquinaria, instrumentación de procesos, integración con PLCs y SCADA.
5. Profinet
Tipo: Bus basado en Ethernet industrial.
Características: Alta velocidad, permite comunicación en tiempo real (RT) y tiempo real isócrono (IRT). Compatible con redes IT/OT.
Aplicaciones: Robótica, sistemas de control en tiempo real, sincronización de movimiento.
6. EtherCAT
Tipo: Ethernet industrial de alto rendimiento.
Características: Baja latencia, tiempos de ciclo de microsegundos, transmisión en cascada sin switches adicionales.
Aplicaciones: Control de movimiento, robótica, CNC, automatización de alta velocidad.
7. CANopen
Tipo: Protocolo basado en CAN.
Características: Bajo consumo de energía, comunicación determinista y tolerante a fallos.
Aplicaciones: Automoción, maquinaria móvil, sistemas embebidos en robótica.
8. DeviceNet
Tipo: Basado en la red CAN.
Características: Conexión de sensores, actuadores y PLCs en una arquitectura distribuida. Alimentación y comunicación en un solo cable.
Aplicaciones: Control de procesos industriales, integración con PLCs Allen-Bradley.
9. Foundation Fieldbus
Tipo: Bus de campo descentralizado.
Características: Permite comunicación bidireccional entre dispositivos inteligentes, optimizado para la automatización de procesos.
Aplicaciones: Instrumentación de procesos en plantas químicas, refinerías y generación de energía.
10. HART (Highway Addressable Remote Transducer)
Tipo: Comunicación digital sobre señales analógicas (4-20 mA).
Características: Protocolo híbrido que permite comunicación digital sin afectar la señal analógica.
Aplicaciones: Sensores de presión, temperatura y flujo en entornos industriales.
11. Interbus
Tipo: Bus de anillo.
Características: Arquitectura determinista, eficiente para redes con grandes distancias.
Aplicaciones: Control de motores, automatización de fábricas.
12. CC-Link
Tipo: Bus de comunicación industrial.
Características: Desarrollado por Mitsubishi, optimizado para control distribuido y automatización.
Aplicaciones: Robótica, manufactura, líneas de ensamblaje.
13. Sercos III
Tipo: Bus de tiempo real sobre Ethernet.
Características: Sincronización precisa, utilizado para control de movimiento.
Aplicaciones: CNC, robótica, automatización de alta precisión.
1.1. Modbus
¿Qué es Modbus?
Modbus
es un protocolo de comunicación abierto, utilizado para transmitir
información a través de redes en serie entre dispositivos electrónicos.
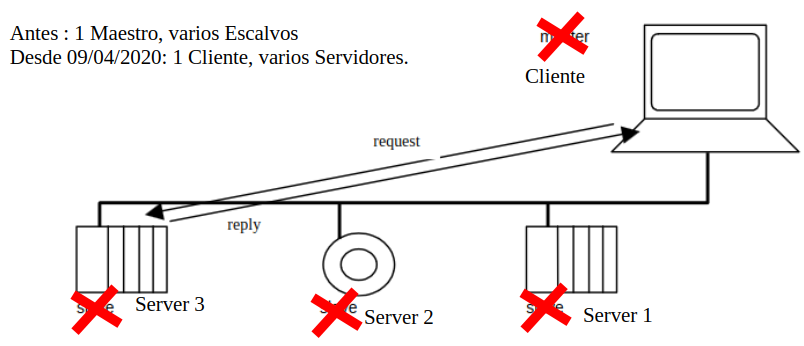
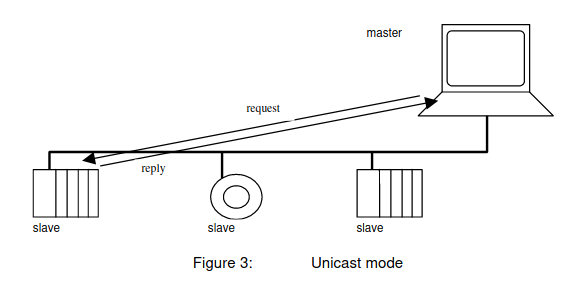
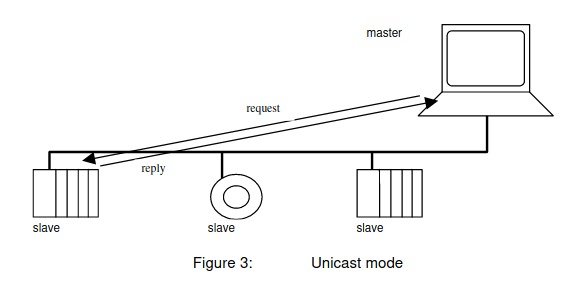
El dispositivo que solicita la información se llama maestro cliente Modbus y los dispositivos que suministran la información son los esclavos server Modbus.
Sitio:https://modbus.org/

Desde el 9 de Julio de 2020, Modbus reemplaza el termino master-slave por client-server, por cuestiones racismo.(https://modbus.org/docs/Client-ServerPR-07-2020-final.docx.pdf)
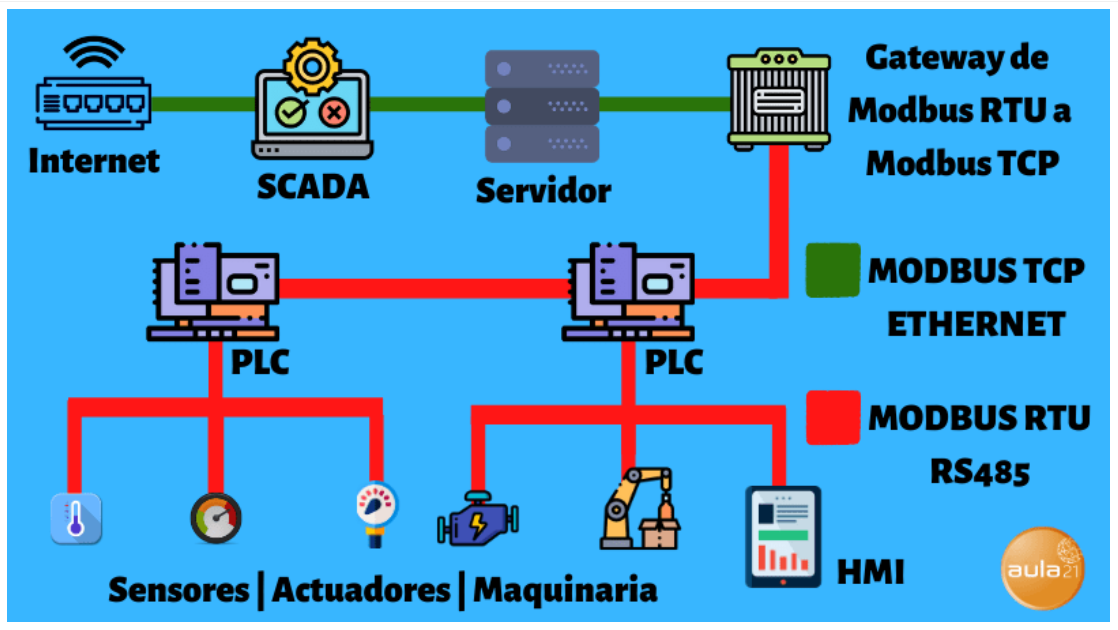
El esquemático quedaría:
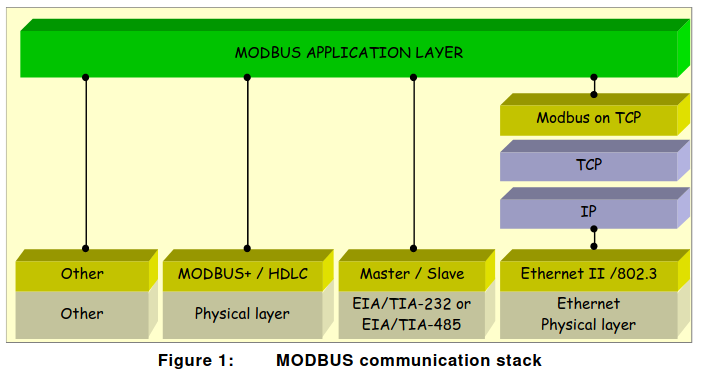
MODBUS es un protocolo de mensajería de capa de aplicación, posicionado en el nivel 7 del modelo OSI,
que proporciona comunicación cliente/servidor entre dispositivos conectados en diferentes tipos de
El estándar serial de facto de
la industria desde 1979, MODBUS continúa permitiendo a millones de
Dispositivos de automatización para comunicarse. Hoy, el apoyo a la
estructura simple y elegante de MODBUS sigue creciendo. La comunidad de
Internet puede acceder a MODBUS al puerto reservado 502 en la pila
TCP/IP.
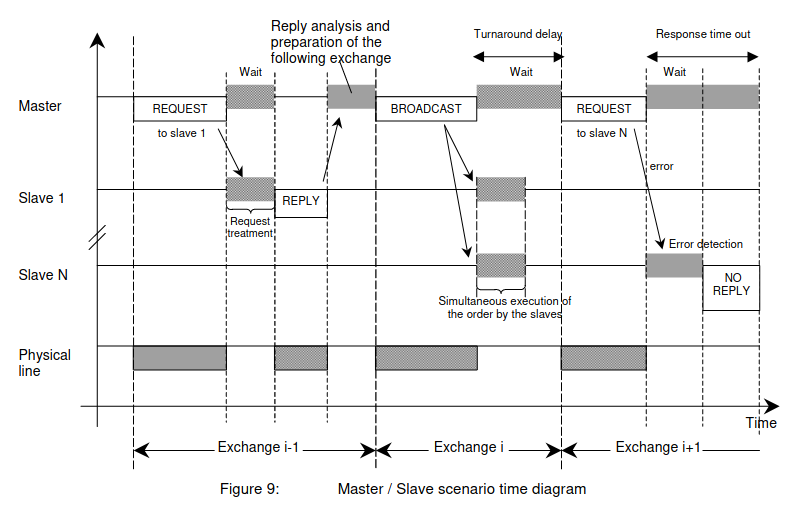
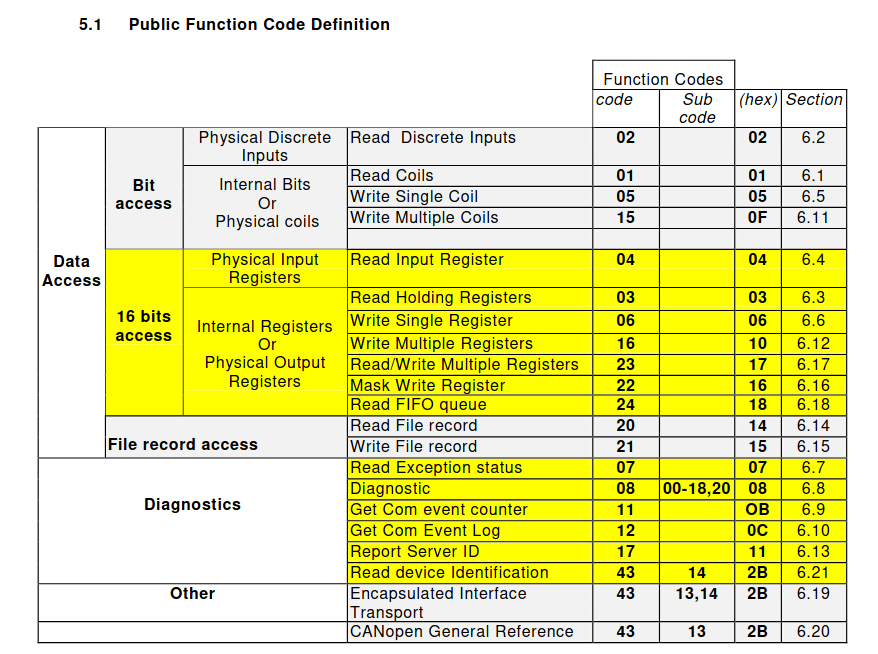
MODBUS es un protocolo de solicitud/respuesta y ofrece servicios especificados por códigos de función.
¿Quién inventó Modbus?
Este protocolo industrial estándar fue creado por Modicon, ahora Schneider Electric, a finales de los 70 para la comunicación entre controladores lógicos programables (PLC). En la actualidad, Modbus sigue siendo el protocolo más usado para conectar dispositivos industriales.¿Como funciona?
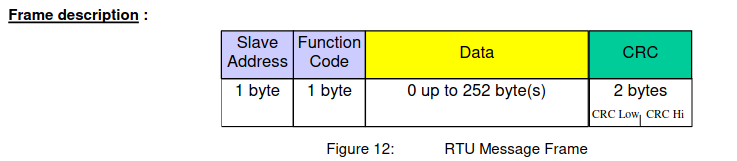
Trama
- TCP/IP sobre Ethernet. Consulte la Guía de implementación de mensajería MODBUS V1.0a.
- Transmisión serial asíncrona a través de una variedad de medios (cable: EIA/TIA -232-E, EIA-422,EIA/TIA-485-A; fibra, radio, etc.)
- MODBUS PLUS, una red de paso de token de alta velocidad.
Esquema de una red Modbus.
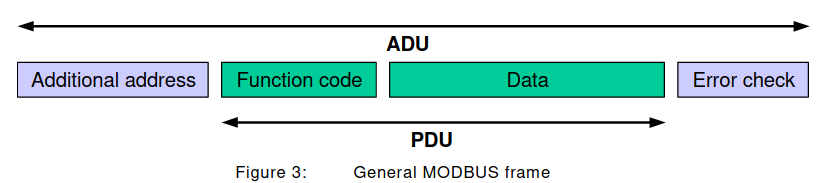
Trama
Campo Función: valores de 1 a 127, el rango 128 a 255 está reservado. El 0 no es válido. Para mayores referencias sobre los campos de función referirse a la bibliografía. A modo de resumen presentamos una tabla que resume:
Implementaciones de Modbus.
Las más comunes son:
- Modbus RTU
- Modbus TCP
- Modbus ASCII
- Modbus Plus
Modbus RTU.
En esta configuración se usa una codificación binaria en el campo de datos y una fuerte verificación de errores CRC. En realidad, es la implementación del protocolo Modbus utilizado con mayor frecuencia en aplicaciones industriales e instalaciones de producción automatizada.
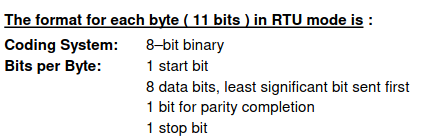
Los datos se transmiten en bytes de 8 bits, un bit cada vez, a velocidades en baudios que van de 1200 bits por segundo (baudios) a 115200 bits por segundo. La mayoría de los dispositivos sólo soportan velocidades de hasta 38400 bits por segundo.
Modbus ASCII
Es similar al Modbus RTU , solo que en el campo de datos de la trama van caracteres ASCII. Modbus ASCII es una implementación más antigua que contiene todos los elementos de un paquete RTU, pero expresada completamente en caracteres ASCII imprimibles. Estos son caracteres hexadecimales que contienen 4 bits de datos cada uno.
Actualmente, este protocolo se considera obsoleto, ya no se utiliza con frecuencia y no está incluido en la especificación formal del protocolo Modbus.

¿Qué diferencias existen entre Modbus ASCII y Modbus RTU?
Modbus TCP
Modbus/TCP se introdujo para
aprovechar las infraestructuras LAN actuales. A su vez, aumentó el
número de unidades que podían conectarse a la misma red.
Este sistema
engloba los bloques de datos de solicitud y respuesta del Modbus RTU en
un bloque TCP transmitido a través de redes estándar de Ethernet.
Por
otro lado, el número de unidades sigue estando incluido y su
interpretación varía según la aplicación: la dirección de la unidad o
del esclavo no es el medio principal de direccionamiento en el TCP.
Entonces, la dirección más importante aquí es la dirección IP,.
El puerto estándar para Modbus TCP es el 502, pero el número de puerto a menudo puede reasignarse si se desea.
La
versión TCP sigue el modelo de referencia de Red OSI. Por otro lado,
define las capas de presentación y aplicación en el modelo OSI.
En consecuencia, Modbus
TCP hace que la definición de maestro y esclavo sea menos obvia, porque
la Ethernet permite la comunicación entre pares. La definición de
cliente y servidor son los elementos más conocidos en las redes basadas
en Ethernet.
En este contexto, el esclavo se convierte en
el servidor y el maestro en el cliente. Puede haber más de un cliente
que obtenga datos de un servidor. En términos de Modbus, esto significa
que puede haber múltiples maestros así como múltiples esclavos.
El Modbus/TCP se utiliza frecuentemente en
- PLC (controladores industriales)
- Sistemas SCADA (visualizaciones y control básico de procesos industriales)
- Sensores y actuadores
Modbus Plus (MB+)
Modbus Plus es un protocolo de red con alta velocidad punto a punto (1 a 2 Mbps). Es una versión mejorada de Modbus creada por Schneider y Modicon, (hoy es manejada por la organización Modbus) pensada para el control Industrial. A diferencia de comunicación Cliente/Servidor, cualquier dispositivo puede iniciar la transmisión, siempre que cumpla la condición de poseer el token (Token passing channel access )
El token (trama especial) circula entre todos los nodos de la red (cada dispositivo va pasando el token al siguiente). Solo el nodo que posee el token puede transmitir datos, lo que elimina la posibilidad de colisiones en el bus. En definitiva, es un sistema completo con un medio predefinido y la aplicación de un sistema de comunicación de paso rápido, da lugar a un funcionamiento determinista, aunque no del todo rápido en todas las condiciones.(Recordar Token Ring).
Por consiguiente, es un sistema LAN para aplicaciones de control industrial, que permite a los dispositivos en red intercambiar mensajes para el control y la supervisión de procesos en lugares remotos de la planta industrial.
La capa física se implementa con RS485 y funciona sobre cable de par trenzado blindado.
1.2. Implementaciones Modbus
Implementación serie : Buses 2 hilos o 4 hilos.
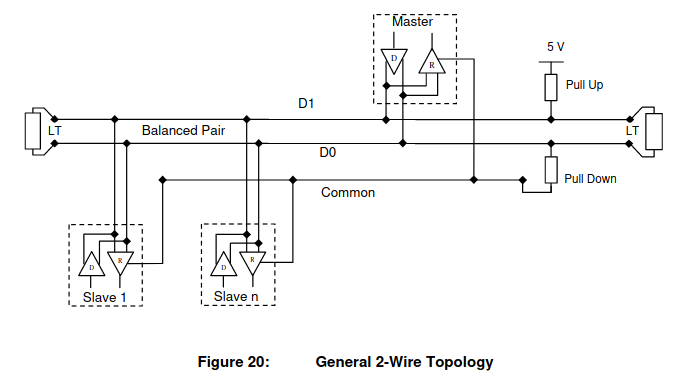
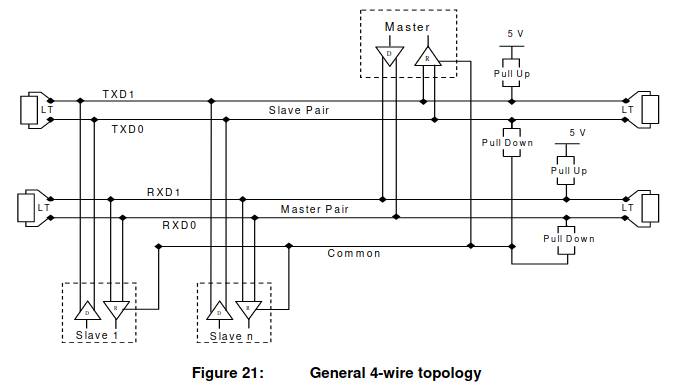
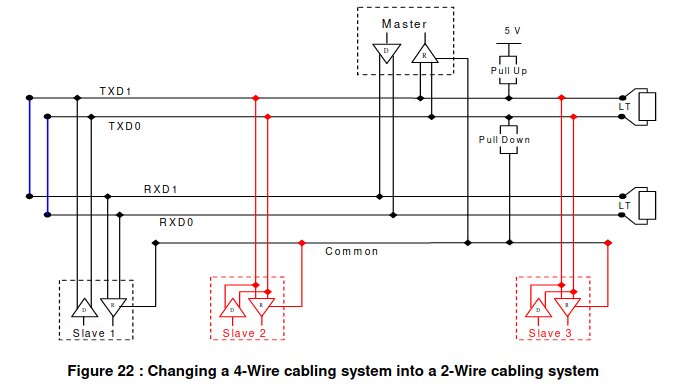
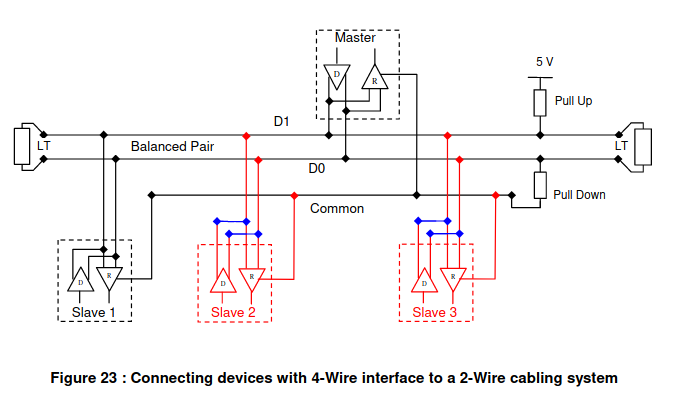
Alternativas cruzadas.
1.3. Profibus
Profibus (DP, PA)
Tipo: Bus de campo de alto rendimiento.
Características:
Profibus DP (alta velocidad para automatización discreta),
Profibus PA (para entornos peligrosos en automatización de procesos).
Aplicaciones: Control de maquinaria, instrumentación de procesos, integración con PLCs y SCADA.
El sistema fue desarrollado por una iniciativa del gobierno alemán a fines de la década de 1980, en conjunto con varias empresas y rápidamente se posicionó dentro de las tecnologías más adoptadas, debido a sus prestaciones y a su estructura estandarizada y abierta.
Esta tecnología se implementa a nivel de la capa física con el estándar RS-485 tan conocido para esa época.
PROFIBUS es una red de comunicación industrial para dispositivos distribuidos que se encuentra entre los más utilizados en el mundo. Está diseñado para controlar procesos industriales, transportando datos y permitiendo la interconexión de equipos a través de tarjetas de interfaz física.
Las principales características de PROFIBUS son:
- Es una red de comunicación de tipo determinística, apto para control de procesos, que usa el mecanismo de control de acceso maestro-esclavo.
- Tiene dos versiones diferentes, PROFIBUS DP y PROFIBUS PA
- Utiliza protocolos estandarizados y abiertos
- Soporta fuertemente cargas parciales sin perder información o detenerse;
- Es compatible con sistemas antiguos sin necesidad de reemplazarlos.
1.4. Profinet
s
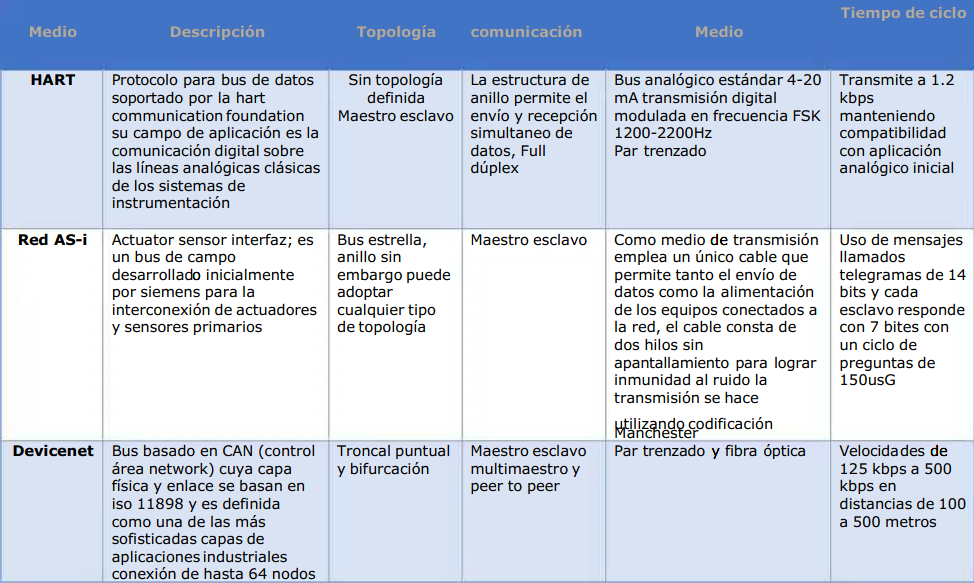
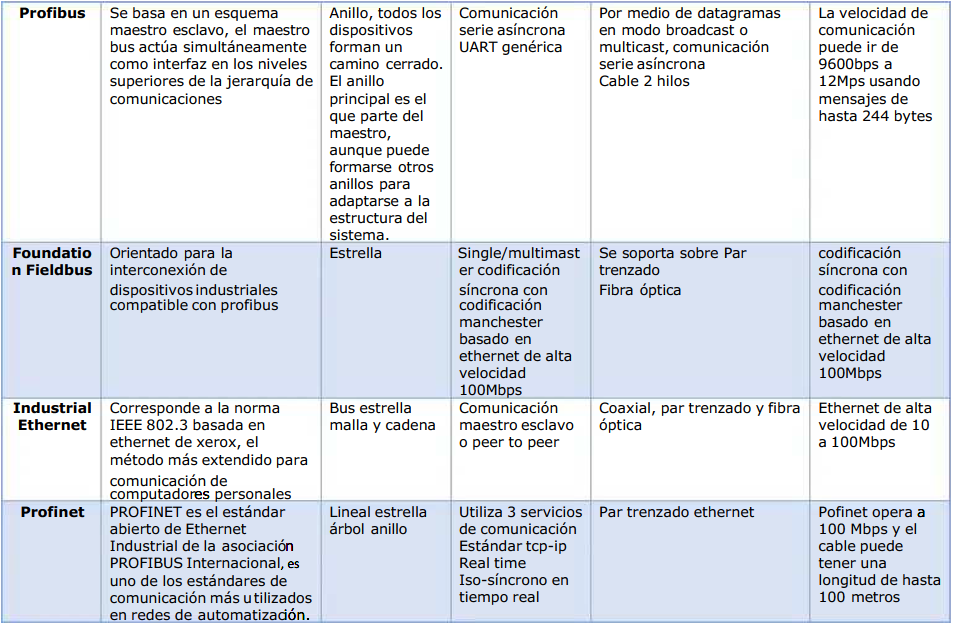
1.5. Tabla Comparativa