Ejercicio Integrador 2024 - Control de Robot Diferencial
2. Introducción
2.5. Sensor ultra sónico
El robot cuenta con un dispositivo compuesto por un emisor y receptor de ondas ultrasónicas. Se trata de un sensor de distancias HC-SR04 que cuenta con la electrónica apropiada para controlar el par de transductores.
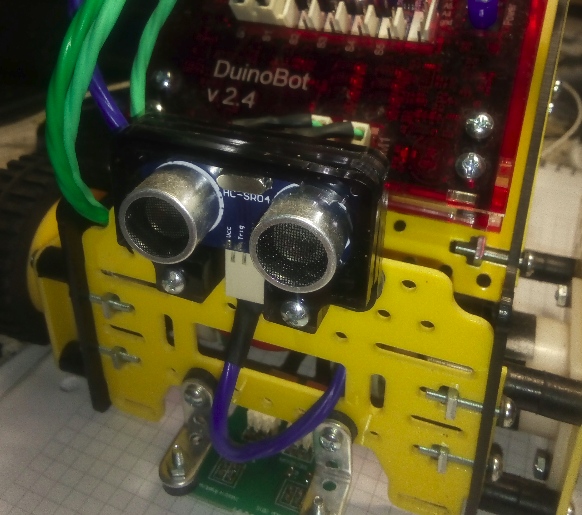
La función del conjunto se basa en emitir un pulso de ondas ultrasónicas que al rebotar en un objeto retornan hasta el receptor permitiendo calcular la distancia a la que se encuentra el objeto.

Para poder gestionar el funcionamiento de este dispositivo se deberá utilizar la biblioteca NewPing.h especialmente dedicada a esto.