Ejercicio Integrador 2024 - Control de Robot Diferencial
2. Introducción
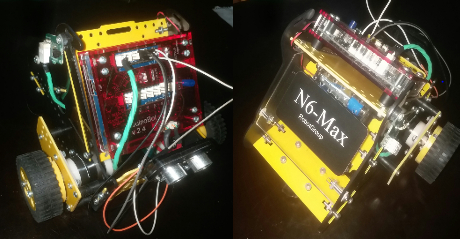
2.1. Pesentación del Robot Múltiplo N6 MAX
El Robot Multiplo N6 MAX
con fines educativos diseñado y ensamblado por la desparecida empresa
RobotGroup. Se trata de un sistema equipado por motores que mueven dos ruedas, una a cada lado del mismo, y una tercera "loca" que se acomoda a la posición y trayectoria impuesta por el desplazamiento.
Además cuenta con un conjunto de sensores que utilizaremos, entre ellos:
Sensores Infra-Rojos capaces de detectar diferentes reflejos del suelo donde se posicionan.
Sensor Ultra Sónico capaz de medir la distancia hasta un objeto.
Entre otros que no utilizaremos.
Además de contar con un conjunto de pilas para alimentar el funcionamiento de los motores y el Arduino cuando este último no está conectado a la PC